アポロ11号の月面着陸から50年余。今再び、各国による月へのレースが過熱している。この8月にはインドの無人探査機が月面着陸に成功して世界を驚かせたところだが、日本でもJAXAが行う月面着陸実証計画「SLIMプロジェクト」が進行中。9月7日に打ち上げが成功し、日本初の月面着陸成功に向けて期待が高まっている。
そんなSLIMプロジェクトに一風変わったロボットが参加しているらしい。。国立研究開発法人宇宙航空研究開発機構(以下「JAXA」)、タカラトミー、ソニーグループ株式会社、同志社大学が共同開発した「SORA-Q(ソラキュー)」だ。このSORA-Q、おもちゃのようなかわいらしい見た目とは裏腹に、大きな使命を負っているという。タカラトミーでロボット玩具などの開発に携わり、現在は同志社大学教授である渡辺公貴先生の研究室を訪ね、開発秘話とSORA-Qのミッションについてお聞きした。
丸い機体に変形玩具の技術とロマンが詰まった月面探査ロボット!
まずはさっそく「SORA-Q」を見せていただいた。ボール状の外殻が半分に割れて、中からカメラやしっぽ(スタビライザー)が飛び出している。手のひらに乗るサイズでとても軽い。実はこれは9月に一般販売されたプロダクトモデルだが、大きさや形、変形、動き方は月に送られる実機とほとんど変わらないという。

「SORA-Q」のプロダクトモデルである「SORA-Q Flagship Model」。特撮番組に出てきそうなデザインが少年心をくすぐる。

左がプロダクトモデル、右は月面に送られる実機により近いテストモデル。外殻部分がプロダクト版よりも薄く、軽量化されている。一部パーツが透明なのはテスト時に内部を確認しやすくするため。
球形のロボットといえば、筆者は2000年の映画「ジュブナイル」に登場したテトラが真っ先に思い浮かぶ世代である。テトラは(なぜかカタコトで)喋ったりするかわりに手足を付けてもらわないと動けなかったが、SORA-Qは変形して元気に動き回る。どちらかというとトランスフォーマーだ。
変形して机の上を走り回るSORA-Q。トランスフォーマーなどの変形玩具を多く手掛けるタカラトミーらしいロボットだ。

プロダクト版は専用のアプリをインストールしたスマホで操縦する。本体のカメラの映像もリアルタイムに確認できる。
左右の外殻をえっちらおっちら回転させてクロールするように動き回る姿がいじらしいが、この動きにこそ、月面のでこぼこな砂地を攻略するための秘訣があるという。ある生き物から着想を得たそうだが、その生き物とは何だかわかるだろうか?
答えはのちほど渡辺先生に教えていただくとして、SORA-Qが月面でどんな活躍をするのかをお聞きした。
日本の宇宙技術開発の鍵!? 月面の砂・レゴリスのデータを集める
SLIMに搭載されるSORA-Qの大きな役割は、月面の低重力環境下における超小型ロボットの探査技術を実証することだという。SLIM着陸機が月面に近づいたら、SORA-Qはボール状の形態のまま放出される。落ちたところで変形・移動して着陸機「SLIM」の様子を内蔵カメラで撮影し、さらに動き回って砂の上にできた轍を撮影したり、搭載されている加速度センサーで走行ログを取ったりする。それらのデータを中継機(LEV1)介して地球に送るまでがSORA-Qのミッションだ。
なぜ砂地の情報が必要なのだろうか?
「月面を覆う砂のことをレゴリスと呼びます。隕石が月面に衝突して両者が砕け散ることで生じたレゴリスは長い時間をかけて降り積もり、場所によって数センチから10メートルぐらいの厚みで堆積しています。
現在、トヨタとJAXAの共同で大型月面ローバー『ルナクルーザー』の開発が進められているのですが、かなりの重さになるローバーを月面に持って行ってうまく走行できるかどうかを知るためには、まずレゴリスの状況を知る必要があります。地球の6分の1の重力でレゴリスがどの程度フカフカなのか、あるいはそうでもないのか。重たいタイヤが沈み込んでしまわないかどうか……SORA-Qには、将来の有人探査に向けてこうした情報を集めることが期待されています」
せっかく莫大な労力とお金をかけてローバーを月面に送っても、走行できなければ意味がない。かといって、6分の1重力でのレゴリスの振る舞いは実験室で簡単に再現できるものでもない。月面へのレースでアメリカ、ロシア、中国、そしてインドが先行するなか、SORA-Qがもたらす「生の月面」の情報は日本の宇宙技術開発の遅れを取り戻す意味でも非常に重要なのだ。
今年4月にはSORA-Qを載せた日本の民間プロジェクト「HAKUTO-R」が月面着陸に挑戦したが、残念ながら着陸失敗という結果に。宇宙関係者はSLIMプロジェクトの成功を固唾をのんで見守っている。
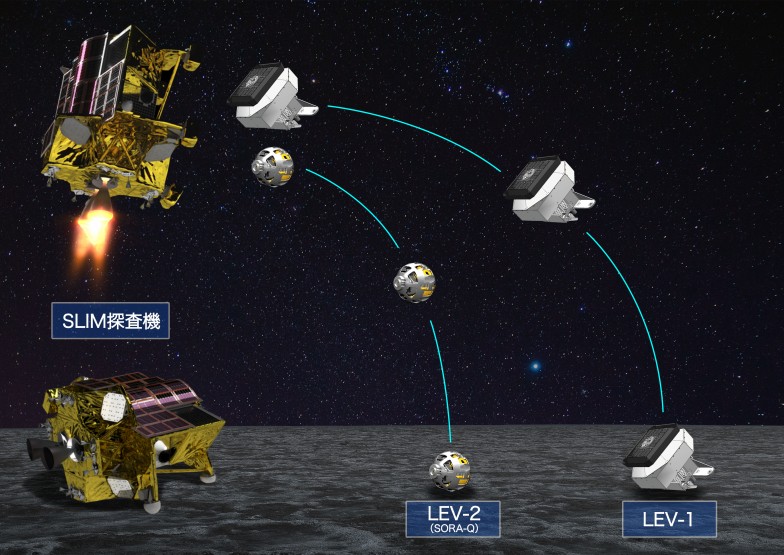
SLIM着陸機から放出されるSORA-Q(LEV-2)のイメージ。SORA-Qが収集したデータはbluetoothで小型探査ロボットLEV-1に送られ、LEV-1から地球に送信される。(Credit: JAXA/タカラトミー/ソニーグループ(株)/同志社大学)
玩具メーカーが月面探査ロボットをつくった理由
月面探査ロボットを開発することになったきっかけは、JAXAの公募だったそうだ。タカラトミーに在職中だった渡辺先生がたまたま見つけたその公募は、月や火星での活動を想定した「昆虫型ロボット」の共同開発パートナーを募集するというもの。大学や民間の宇宙開発企業が手を挙げるなか、玩具メーカーとして応募に踏み切ったわけだが、渡辺先生にはもちろん勝算があった。
「当時私はタカラトミーの戦略開発部という部署にいて、既存の玩具の枠を越えたような新しい玩具を開発するべく、先端技術に関する情報を日常的に集めていました。昆虫型ロボットの公募に応募したのも、JAXAとならば何か面白いものがつくれそうだと思ったからです。
公募の7年前には『i-SOBOT(アイソボット)』という小型ロボットを開発しまして、それがなんと2008年の『今年のロボット』で経済産業大臣賞(つまり大賞)をいただいたという実績があります。おもちゃに限らずその年に発表されたあらゆるロボットの中でのナンバーワンに選ばれたのは相当大きな評価で、その年に開催された北海道洞爺湖サミットでもお土産として参加各国のエネルギー大臣にプレゼントされるほどでした。そんなタカラトミーならば何か面白いものをつくれるんじゃないかということで、めでたくJAXAの共同研究のパートナーとして採用いただくことになりました」
もともと同社には、玩具に限らず社会の役に立つものをつくろうという社風があるのだという。玩具メーカーとしてのノウハウを宇宙開発に活かすというのもある意味、当然の発想だったのだろう。

渡辺先生にとって思い入れが深い「i-SOBOT」。小さな体の中に17個のモーターが入っていて、器用に全身のバランスを取りながら歩いたり踊ったり多彩な動きを見せる。精巧なだけでなく、子供が遊んでも壊れない頑丈さも持ち合わせている。
そうして動き出した共同研究。探査機の研究をするJAXAの久保田孝教授へのヒアリングを行うなかで、「タカラトミーといえばトランスフォーマーのような変形ロボット。球体から変形するロボットをつくってみては」という話が出たという。球形であることにはもちろんちゃんとした意味がある。ロケットに搭載する際に場所を取らないし、自分を守る外殻と車輪を兼ねた構造を実現できる。着陸船から月面に向かってポンと放出されても平気だから、探査機を月面に降ろすためのスロープを用意する必要もない。宇宙開発は1kgの物体を打ち上げるのに1億円のコストがかかる世界だ。小さく、軽くてすむ球形の構造はある意味で最適解といえる。
奇しくも、渡辺先生もそれに先立って球体ロボットを研究していたところで、昆虫型にはあえてこだわらず「月面の砂の上を歩く球体ロボット探査機」というコンセプトができあがった。
月面攻略のヒントは、生き物の動きを再現する「玩具ならではの工夫」だった
球形の外殻が半分に割れて、それを車輪のようにして移動する。言葉にすれば単純なコンセプトだが、これが実際につくってみるとなかなかうまくいかなかったそうだ。
「スタートから1年経ってJAXAで評価会があったのですが、そのときに発表した機体では、砂地で13度までの傾斜しか登ることができなかったんです。実際に月面でちょっとした穴ぼこがあれば身動きが取れなくなってしまう。発表に対する反応は悪くなかったのですが、自分では『お話にならないな』と思っていました」
とはいえひとまず球体ロボットのコンセプトが好評を得たことで、チャンスは次につながることになった。プロジェクトの終了後、JAXAとタカラトミーは月面での運用を前提にさらに踏み込んだ共同研究に向けて契約を締結したのだ。具体的には、JAXAが取り組む小型月着陸実証機SLIMに球形ロボットを搭載するという計画だ。球形ロボットが月面で活躍する未来が一気に現実味を帯びてくるが、そのぶんさらにシビアな制約が開発チームの前に立ちはだかる。
「SLIMに搭載するために、直径は80mm以下、質量は300g以下にしなければいけなくなったんです。評価会で発表した直径100mmの機体でも13度の傾斜を登るので精一杯でしたが、80mmにすると10度でも登れない。それですごく悩みました。一晩だけすごく悩んだら、ある動物が思い浮かんだんです」
それは、ウミガメだった。
孵化したばかりのウミガメの赤ちゃんは、親が産卵のために砂浜に掘った深い穴を器用に登っていくではないか。その秘密は、左右交互に砂を掻くヒレの動きにありそうだ。この動きを球体ロボットで再現できれば、傾斜のある砂地を攻略できるかもしれない。
そこで渡辺先生は、玩具でよく使われるある工夫を取り入れることにした。「ここに車輪で前に進む動物の玩具があります。動物がただ車のようにスーッと進んでも面白くないですよね。そこでちょっとした工夫をしてやります。車輪の軸をずらしてやることで、上下にカタカタ揺れるような動物らしい動きになるんです」
軸をずらすというシンプルな工夫が効果てきめんだった。球形ロボットの回転する左右の半球の中心軸を少しずらしてやると、ロボットはウミガメのように器用に砂を掻いて砂地を登り始めた!
「完成形のSORA-Qでは、砂が自重で崩れてできる角度に近い30度の傾斜でも元気よく登れるようになりました」。渡辺先生が言うとおり、その動きはまるで生き物のように見えるから不思議だ。ウミガメの他に、ヒレを使って干潟を飛び跳ねるように移動するハゼの仲間の動きも参考にしているそうだ。
「家庭で遊べる宇宙探査ロボット」で宇宙を身近に感じてほしい
SORA-Qが現在の形になるまでには、もう一つの苦労があった。それは、宇宙探査ロボットであるとともに玩具としても成り立たせるためのデザインだ。
「もともと、宇宙利用とともに一般向けのビジネスにもつなげるという枠組みで共同研究を行っていたんです。ですが、宇宙でも使えて、玩具としても魅力的なものをと考えたときに、どんなものをつくるのかが実は非常に難しかった。というのも、宇宙に持っていくものというのは意外とみんなシンプルなんです」
検討段階では、その道で超有名なデザイナーが手掛けた、それはもう惚れ惚れするようなデザイン案もあったそうだ。しかし、デザインが複雑になればなるほど隙間にレゴリスが入って故障してしまうリスクが上がる。実用性を考慮して最終的に落ち着いたのが今の形だという。お蔵入りになってしまったという案を見てみたかったような気もするが、やはりそこは「月面での実用に耐えるロボット」でなければ意味がないだろう。
9月2日にはタカラトミーから「SORA-Q Flagship Model」が一般発売された。公式サイトによると対象年齢は8歳以上。月面で活躍するのとほぼ同じロボットで小学生が遊ぶことができるなんて、まるでドラえもんのような話だ。
「理系離れと言われる世の中ですが、SORA-Qを通じてお子さんたちに宇宙や科学技術を身近に感じてもらえると嬉しいです」と渡辺先生は話す。
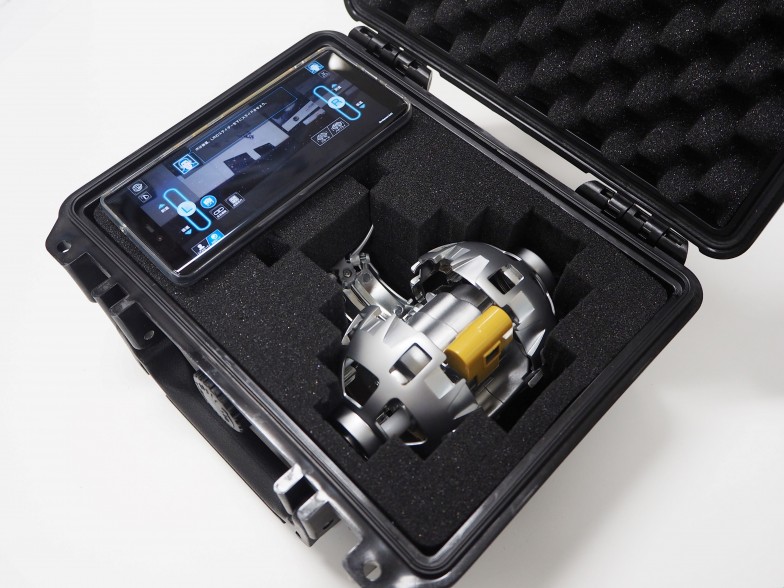
手作りの持ち運び用ケースに収められたSORA-Q。中高生に向けた科学講座でも活躍しているという。
必要とされる場所に、必要とされるロボットを
定年を間近に控えた2020年、渡辺先生はタカラトミーを辞し、かねてから講義を受け持っていた同志社大学に有期の教授として着任した。SORA-Qの開発が一段落した現在は、宇宙開発の未来を担う学生たちを指導しつつ、現在は内閣府が進めるムーンショットプロジェクト目標3の一端を担う新たなロボット開発で大忙しだという。「宇宙で活躍するロボットをつくるのは、i-SOBOTの頃のような開発とは全く違いますね。SORA-QでJAXAと共同研究した経験が今とても役立っています」。
最後に、渡辺先生の考えるロボット開発の今後について伺った。
「ロボット開発には、世の中の需要に応えることと、そのために必要な技術的要素を満たすことの両方が必要です。技術のみを追究した見世物のようなロボットをつくっても使い所がなければあまり意味がないと私は考えています。ファミレスに配膳ロボットが普及したのは、コロナ禍で接触機会をなるべく減らしたいという需要があったからですよね。i-SOBOTのようなロボットは何かをしてくれるわけではないですが、最先端の技術を所有したい、という需要を満たすことができます。反対に、需要があっても技術が追いつかなければロボットはつくれません。
どんなものをいくらで提供できるのかというマーケティング的な面も含めて、出口をしっかり見据えて研究開発すべきですし、私自身もそうありたいと思っています」
近い将来、月に人間が暮らすようになれば、今よりもっとたくさんのロボットがその生活を支えることになるだろう。そんな未来の種はそれこそ子供の頃に遊んだ玩具のような、案外身近なモノのなかにあるのかもしれない。