ゴム、布、糸など、今までなかった柔らかい素材のロボットが今、注目を集めている。ソフトロボティクスという言葉も一般化してきた。10年以上前から柔らかいロボットの研究に取り組むパイオニア、立命館大学の平井慎一先生の研究室を訪ね、現在開発中のソフトロボットのお話を聞いた。それは、人の指のように「つまむ」ことができた・・・!
ソフトロボティクスのパイオニア
平井慎一先生が研究を進めているのは、柔らかいロボットを作る技術、ソフトロボティクス。生産現場などで動いているロボットアームは、鉄などの硬い素材でできている。二足歩行をしたり当意即妙に会話をしたりするスターロボットも、AIが搭載されて知的活動もできるようになってはきたが、彼らも硬い。
「10年ほど前、二足歩行のロボットのデモを見ていたら転んだんです。一旦転んだら、起こすのがなかなか大変だという。じゃあ、転んでもひっくり返っても動けるようなロボットはできないか考えてみよう、と学生たちに問いかけたんです」(平井先生)
大学院生のアイデアから、ゴムでつくった丸い輪っかのようなロボットが生まれた。よく見ると真ん中にスポークのようなものがついているが、これは針金製で、電流をかけると縮む。8本のスポークを順番に縮ませることでアクチュエータ(駆動装置)となって、輪っかは転がって進み始める。さらに、これを3つ組み合わせて球形にすると、坂道を登らせることもできた。さらには、学生のアイデアから、ジャンプさせる方法も生み出した。

ゴムで作った輪っかのロボット
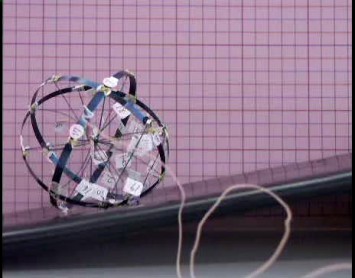
球体にして坂を上る
「ドーム型をしたゴム製のおもちゃで、ホッピングアイって知っていますか? 膨らんだ部分を押して裏返しておくと、元に戻る力でピョンと飛び上がりますね。あの原理を使って、人が指でやるところをアクチュエータを使って変形させ、電流を切れば元の形に戻る時に跳躍するんじゃないかと」
実際に、ロボットは跳躍した。先生たちはさらに、どんな形だとより高く飛び上がるかも研究してみた。
【ここで問題】-------------------------------------------------------------------------------
4つのうち、平井先生たちの実験で一番飛んだのはどれでしょう?
①山形の「キャップ型」
②その反対にくぼませた「カップ型」
③真ん中の上下がくぼんだ「ピーナツ型」
④真ん中を平たくくぼませた「ディッシュ型」
(答えはこの記事のどこかに)
-------------------------------------------------------------------------------------------------------
「形が違うと、エネルギーは同じでも力の伝わり方が違う、というようなことなど、研究によって、柔らかい素材の面白さや可能性の大きさがわかってきました」
そして、ゴムや布や糸や、とにかく柔らかい素材を使ったロボットの研究がスタートした。最近、注目を浴び始めたソフトロボティクス。3年ほど前からは専門の雑誌も登場し、来年は国際会議も開かれているというが、平井先生たちの研究室は、そのずっと前からソフト素材に挑戦していたパイオニアなのだ。
どんなおかずも思いのままにつかむ
平井先生と、共に研究を進める王忠奎(ワン・ヅンクイ)先生が最近研究しているのが、「指」。ゴムなどの柔らかい素材で蛇腹のような切り込みを入れた形のパーツを作るという。
平井先生と王忠奎先生
蛇腹のような形の部分には空気が入って膨らむようにしてあり、圧力をかけて空気を中にぐっと入れると蛇腹が膨らんで全体がカーブを描く。この曲がる指が3本、4本と集まると手の指のように機能して、小豆の入ったおかずカップや卵をひょいと簡単に持てるようになる。ポンプで空気を入れて持ちあげ、空気を戻すと開いて放す。紙製の容器がしなるので人間でもなかなか持ちにくく、小さな子どもなら小豆をこぼしてしまうかもしれないぐらいの難易度。しかも、同じ指で、おかずカップでも唐揚げでも卵焼きでも持てる。
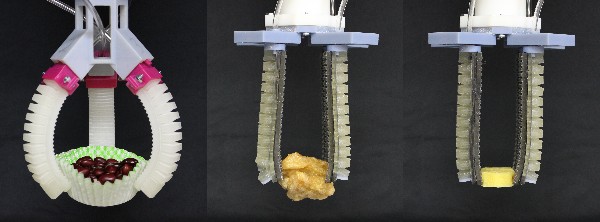
左がおかずカップに入った小豆、中が唐揚げ、右が玉子焼き

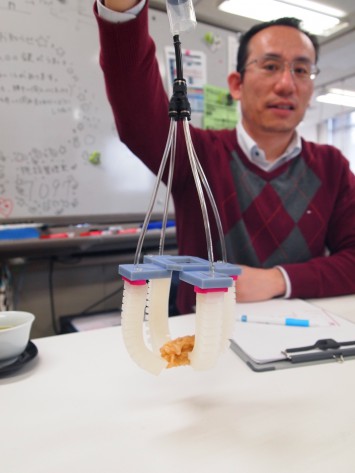
上から注射器で空気を入れると指がうまく曲がり、小豆を入れたおかずカップをしっかりホールド
唐揚げの模型もホールド。唐揚げ模型は、食品サンプルより実物に近い柔らかさや変形具合を実現した特注品
と、おいしそうなものばかり持とうとするのには、訳がある。
「念頭においているのは、お弁当工場やお菓子の詰め合わせ工場で稼働するロボットです。現在の工場に導入されているのは、硬い材質のハンドで、部品ごとに適した形の先端部を個別に設計しているでしょう。この指はそんな手間をかけずに、形がそれぞれ違うさまざまな食品のどれにでも対応できるようにすることをめざしています」と平井先生。
空気を入れると膨らんで曲がる指、というのは以前からあったが、ひだの形を多めや少な目にしたり、硬さを一部だけ変えたり(たとえば先だけギュッと硬くするとか)することで、確実につかめる指を可能にした。
3Dプリンタを使って素材や硬さを少しずつ変えて試行を続けた。柔らかすぎても、硬すぎてもダメ。コンピュータ上でシミュレーションをすること自体大変で、やってみて調整するしかないところもある。(作製する前に、コンピュータ上でシミュレーションを行なって、指の曲がり方を確認した。アプリケーションに応じて、最適なデザインを探すこともできる。)
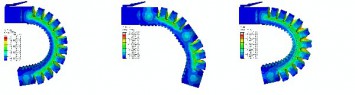
異なる形状の指のシミュレーション。曲がり方を確認

作製した指の実物
また、研究によって、あらかじめ外に向けて広がっていた方が持ちやすいということもわかったため、伸ばした状態の素材にフィルムを張り、自然に広がる指を実現させた。広がった指が、空気を入れることでまっすぐになるような仕組みによって、薄いものでも持ちやすくなった。
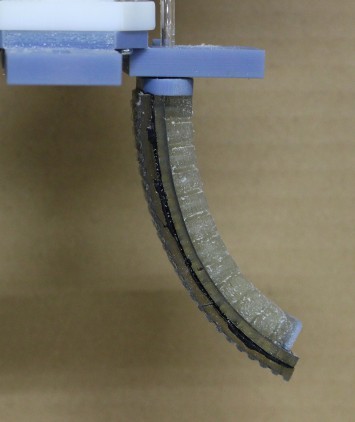
最初から外側にまがった指
「得手不得手はありますが、どんな形でも持てます。重量が重いものも、材料を変えたり圧力を増やすなどすれば、対応できると思います」
すでにお弁当やお菓子の製造ラインに導入を予定。いろんなものを詰めるには人手が必要で、仕事の大変さから常に人手が足らない現場であり、ロボットの導入による効率化のメリットも大きい。平井先生は、さらに、ネットショッピングのバックヤードもターゲットにしている。注文の品を人手でカゴに入れて、段ボール箱に詰める仕事も、お弁当とよく似た大変さがある。
「今まで人の手でしかできなかった、ロボットが入っていないところに導入できるロボットです。今工場で動いているロボットには、いろんなものが入っている箱の中から何かをつまんでくる、という作業がなかなか難しいのです。きれいに揃っているのなら簡単だが、さまざまな形やサイズのものがいろいろな向きで入っているという状況に、対応できなかった」
つまりUFOキャッチャー状態ということで、あの先端が平井研究室の指ならば、ムダにコインを投入することもないのだ。
指を動かすのに必要な小さなサイズの空気圧の調整弁も、学生のアイデアから「無拘束マイクロ空気圧弁」として新開発。さらに、ものをちゃんと持ったかチェックするセンサー、人が近づいてきたら警告できるように電気を通す糸を使って織った布で人との距離を測るセンサーなど、さまざまな技術開発にも取り組んでいる。
2017年11月末から東京ビッグサイトで開かれた「2017国際ロボット展」にも出展し、注目を集めている。人間の指の再現をめざして、今後も、さまざまな構造にチャレンジしてみたいという。
これから作ってみたい柔らかいロボットは?と平井先生に聞いてみると、「枝打ちロボット」という答えが返ってきた。
「木の枝のようなゴツゴツした形の不定型なところを動けるような機構を作って、人がいなくても枝打ちができるようになれば。人じゃないとできない枝打ちは、人手や経費が掛かり過ぎて放っておかれがちになっていますから」
困り事を解決する柔らかいロボットは、まだまだ活躍の場を広げそうだ。
(問題の答え:「ディッシュ型」瞬発力はないが長い時間持続する力がある形だそう)